 Here, co-ordinates of the origin is (0, 0). The y co-ordinates of every point on x-axis is zero.
The x co-ordinates of every point on y-axis is zero.
Oblique axes : If both the axes are not perpendicular then they are more...
Here, co-ordinates of the origin is (0, 0). The y co-ordinates of every point on x-axis is zero.
The x co-ordinates of every point on y-axis is zero.
Oblique axes : If both the axes are not perpendicular then they are more...
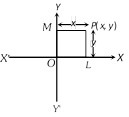
 The two lines \[XOX'\] and \[YOY'\] divide the plane in four quadrants. \[XOY,\text{ }YOX',\text{ }X'OY',\text{ }Y'OX\] are respectively called the first, the second, the third and the fourth quadrants. We assume the directions of \[OX,\,OY\] as positive while the directions of \[OX',\text{ }OY'\] as negative.
The two lines \[XOX'\] and \[YOY'\] divide the plane in four quadrants. \[XOY,\text{ }YOX',\text{ }X'OY',\text{ }Y'OX\] are respectively called the first, the second, the third and the fourth quadrants. We assume the directions of \[OX,\,OY\] as positive while the directions of \[OX',\text{ }OY'\] as negative.






You need to login to perform this action.
You will be redirected in
3 sec

